Building autonomous robotic platforms
We're a team of Berkeley students that are creating ROS based robotic platforms.
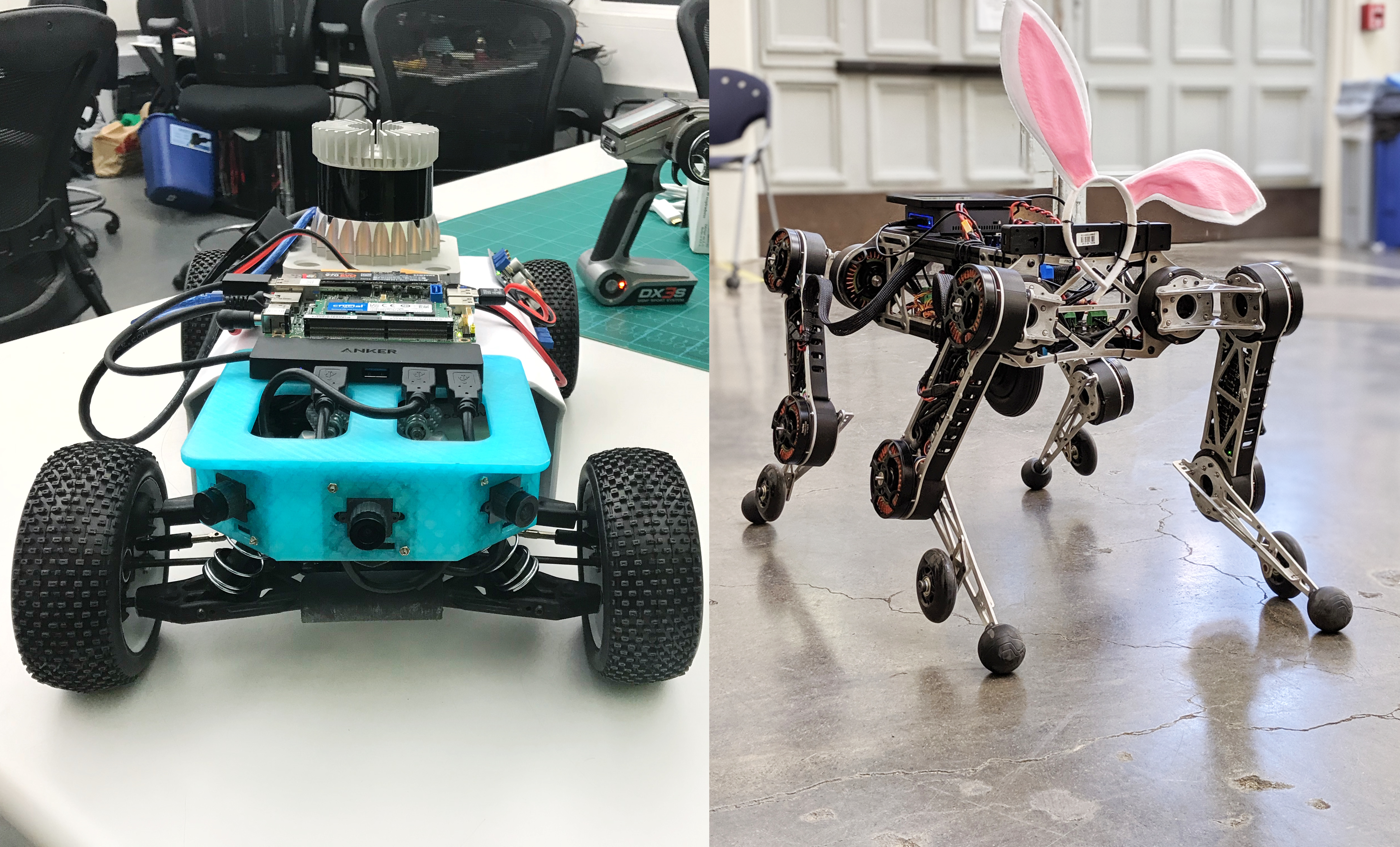
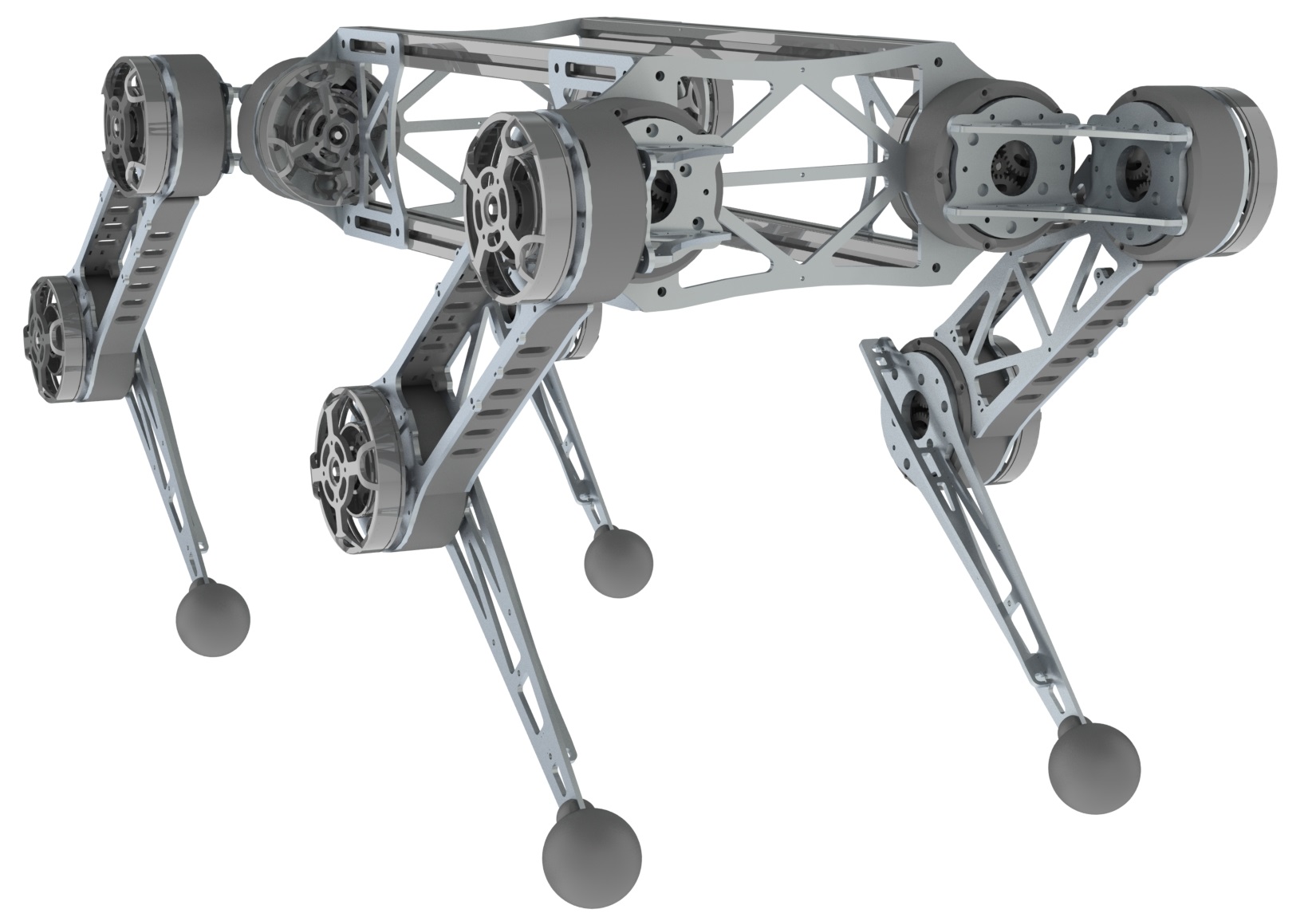
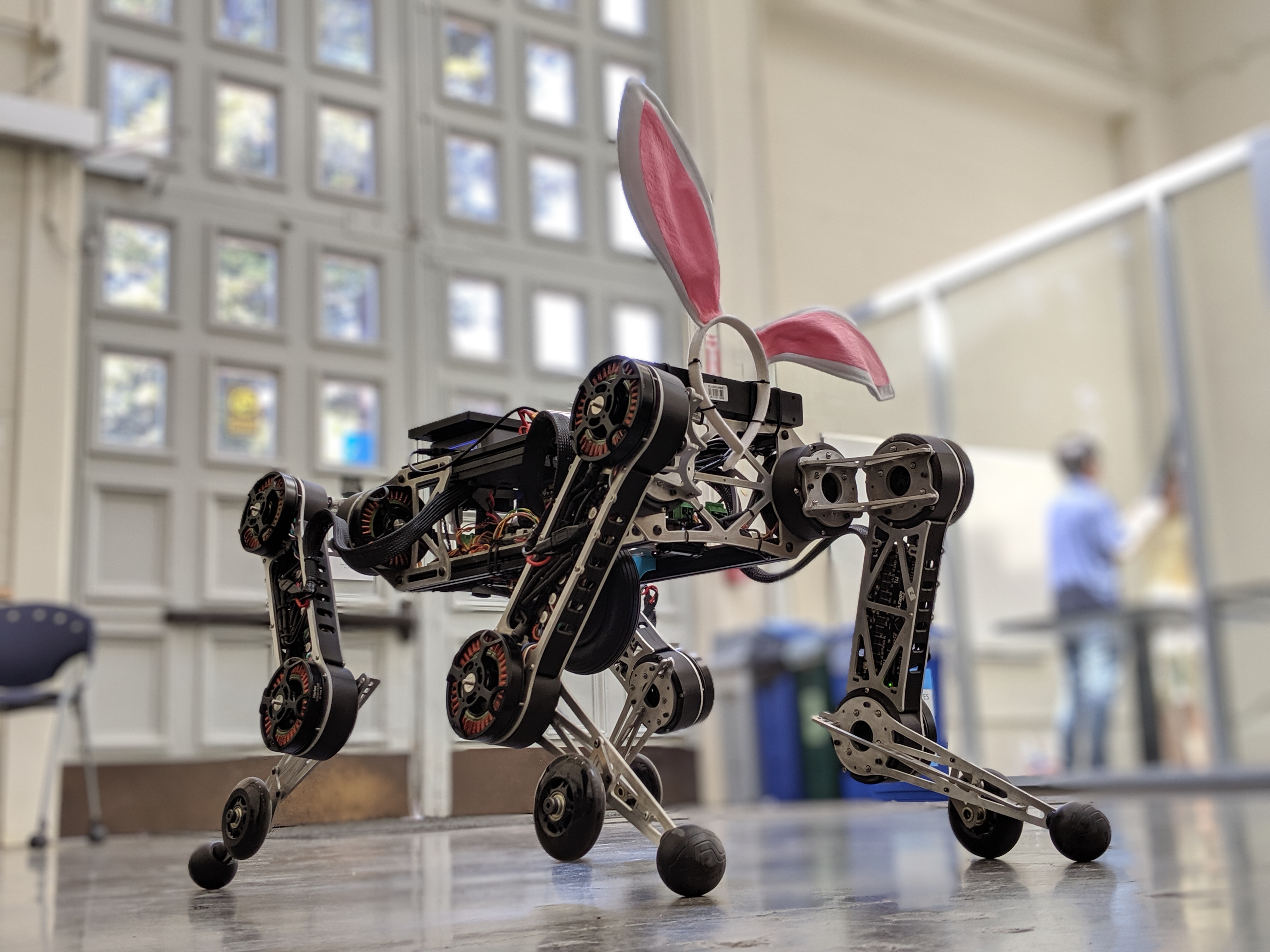
Jelly Technology
All of our code for the Jelly dog is publicly available on our AMAC Github
- Hardware Included:
- 12 100 Kv Motors
- 6 ODrive Motor Controllers
- Custum Hub Motor
- Intel NUC
- Custom Power Board with 24V Kobalt Battery
- Lots of Water-Jet Metal
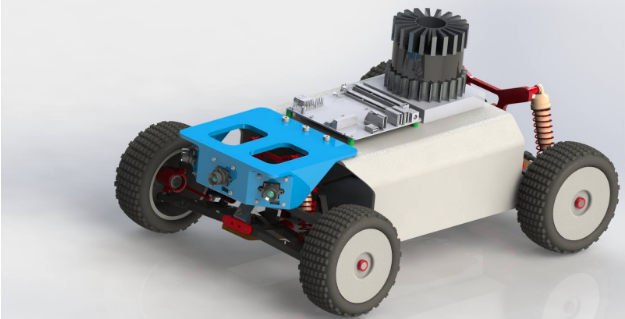
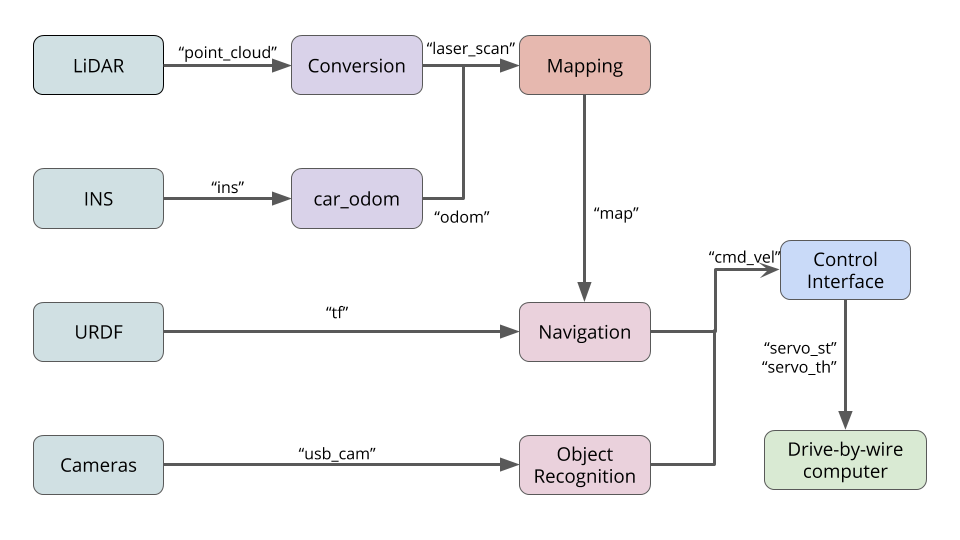
AMAC Technology
All of our code for the AMAC car is publicly available on our AMAC Github
- Hardware Included:
- Ouster Lidar
- IMU
- 3 RGB Camera Assembly
- Intel NUC
- BLDC Motor
- ESC - Motor Controller
Frequently asked questions
What is AMAC?
Autonomous Motion at Cal (AMAC) is a group of students that are working to make autonomous transportation possible. We started with an autonomous RC car and now have also made a 12-DOF robotic dog.
Why are you building this?
There is currently a huge influx of research resources into the autonomous vehicle space so we wanted to work on actualizing these research advances and make it more accessible for undergraduate students to work on.
How can I learn more?
We would love to talk with you about the project. Feel free to email amac_general@berkeley.edu.